

A modification done on many drift cars is to relocate the steering rack to decrease “ackerman” and over-centering. This sounds like a good thing, but what does it really mean? It’s good to have a simple understanding of what’s going on when moving suspension pickup points around. Knowing generally what ways to move pickup points is good, but there is a chance that one may go too far. This may make the car perform worse than when you started! As is always said, suspension tuning is about compromises.
Let’s first focus on the terminology. Wheel angle, when looking down on the car will be defined as the angle between the center-line of the car and the center line of the tire. That is, if the car were facing forward driving in a straight line it would have a wheel angle of 0 (this is assuming that the toe is set to 0 degrees).
If we’re talking about the front wheels, the lead wheel will be defined as the leading wheel in a turn while drifting, and the trailing wheel will be defined as the wheel that is trailing in a turn.
What is known as “ackerman” in the drift community is a little bit different than what is conventionally thought of as ackerman steering. When making a sharp turn, the wheels on the inside of the car need to travel along a different path than the wheels on the outside of the car. The inside front wheel will have to turn in more than the outside wheel, giving the car some toe out. This is considered zero or true ackerman to most people in the automotive community. Positive akerman means the front tires have more toe out than zero ackerman, and negative ackerman is the opposite to where the tires will have some more toe in compared to zero ackerman.
Now back to the drifters… Drifters look at “ackerman” as the net change in toe throughout the steering travel. In the drifting community zero “ackerman” is defined as the wheels keeping the same relative toe angle throughout the steering wheel travel. Positive “ackerman” is defined as any toe gain (toe out) during the steering travel, and negative “ackerman” is defined by any toe in increase throughout steering travel. For this post we will stick with the drifting terminology because, well… its a post about drifting. I’ll also stop putting quotes around the drifters definition of ackerman.
Part 2
Over-centering, people say it’s bad. What is it? Over-centering when talking about the steering is when your tie rod is at such an angle that it will push on the steering knuckle the opposite way you want the steering knuckle to turn. Getting close to over-centering can make the steering input feel pretty heavy because the tie rod will have significantly reduced leverage on the steering knuckle.
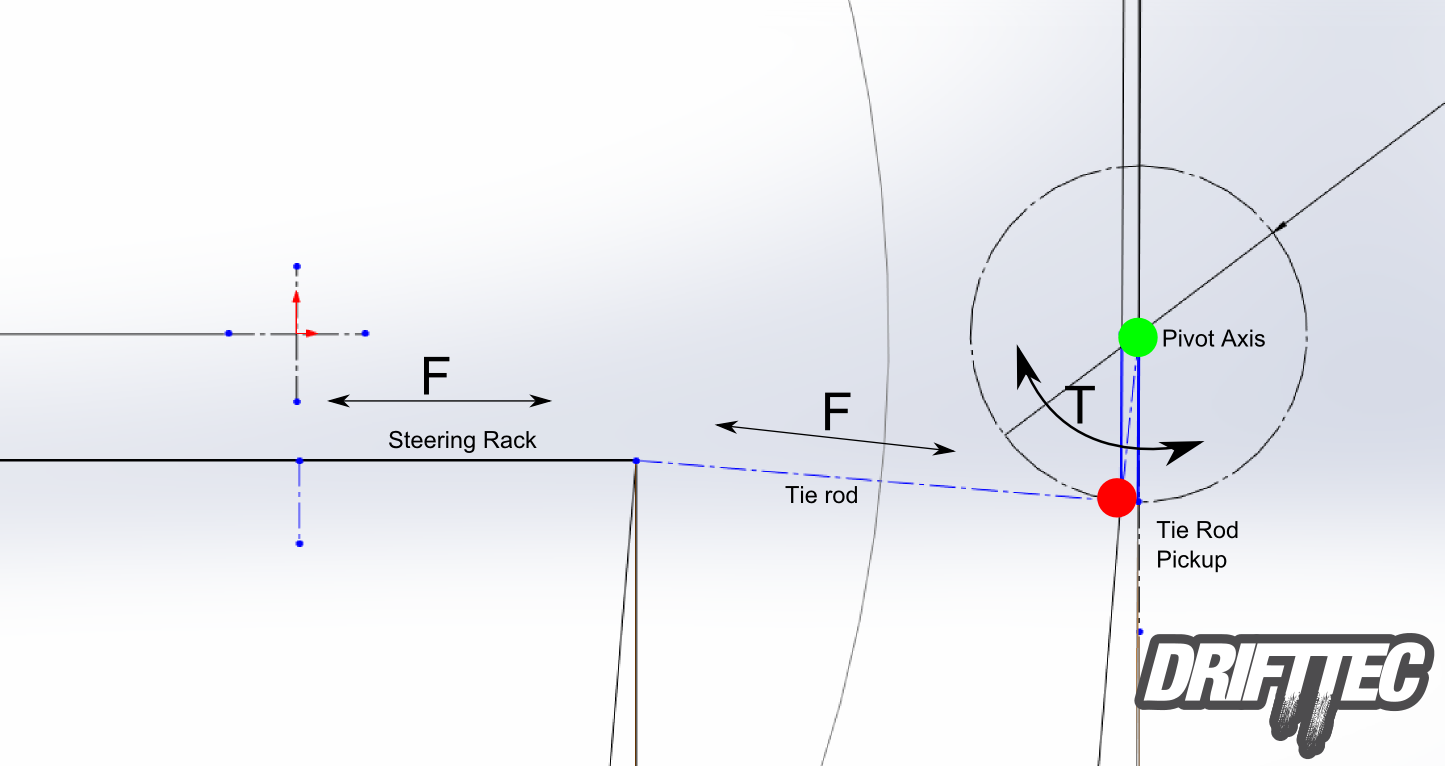
This is a crude over-head view of an arbitrary rear steer steering system (like in a 240sx). Up is forward. In this figure the wheel would be facing straight ahead. The force from the steering rack is applied to the tie rod which in turn applies a force around the pivot axis for the knuckle creating a torque. This torque is what turns your wheels when steering input is applied to the steering wheel.
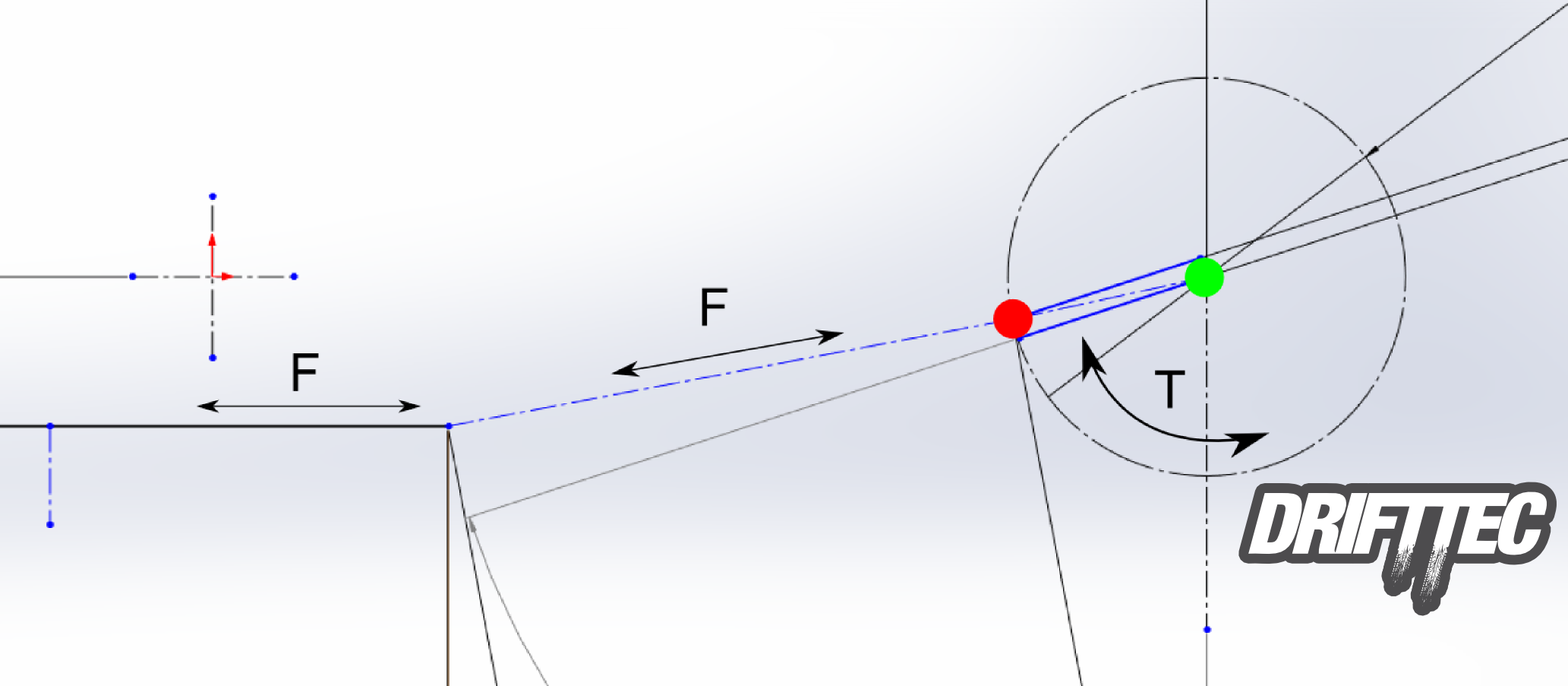
We are looking at the lead wheel if a car was drifting through a left hand turn. In this image the steering rack has displaced to the left pulling on the tie rod which in-turn turns the steering knuckle about its pivot axis. This is at the point at which one would consider over-centering to happen. When trying to steer and move the steering rack, the steering would feel very heavy. This is because the torque required to turn the wheel stays the same as the wheel turns (a bold assumption) but lever arm on the knuckle is decreasing as more angle is achieved. The force applied to by the steering rack must increase to make up for the decrease in moment arm. In this case with over-centering the moment arm on the knuckle is virtually non-existent. The path that the force is applied is directly through the pivot axis. This means no moment is applied which means there cant be any torque applied to the knuckle to turn it. The steering is pretty much stuck here until some outside force turns the wheel. Hopefully it turns the wheel counter-clockwise enough where the driver can gain control. If the wheel is pushed clockwise, the steering inputs from the rack would turn the wheel in the opposite direction than intended (very bad situation).
Now that we’ve got the background we can get into why moving pickup points changes these things. I recently had the cross-member on my s14 modified to have the steering rack moved forward. The main reason I did this is to allow the car to achieve higher steering angle before over-centering. Here is a simplified arbitrary representation of a relocated steering rack moved forward.
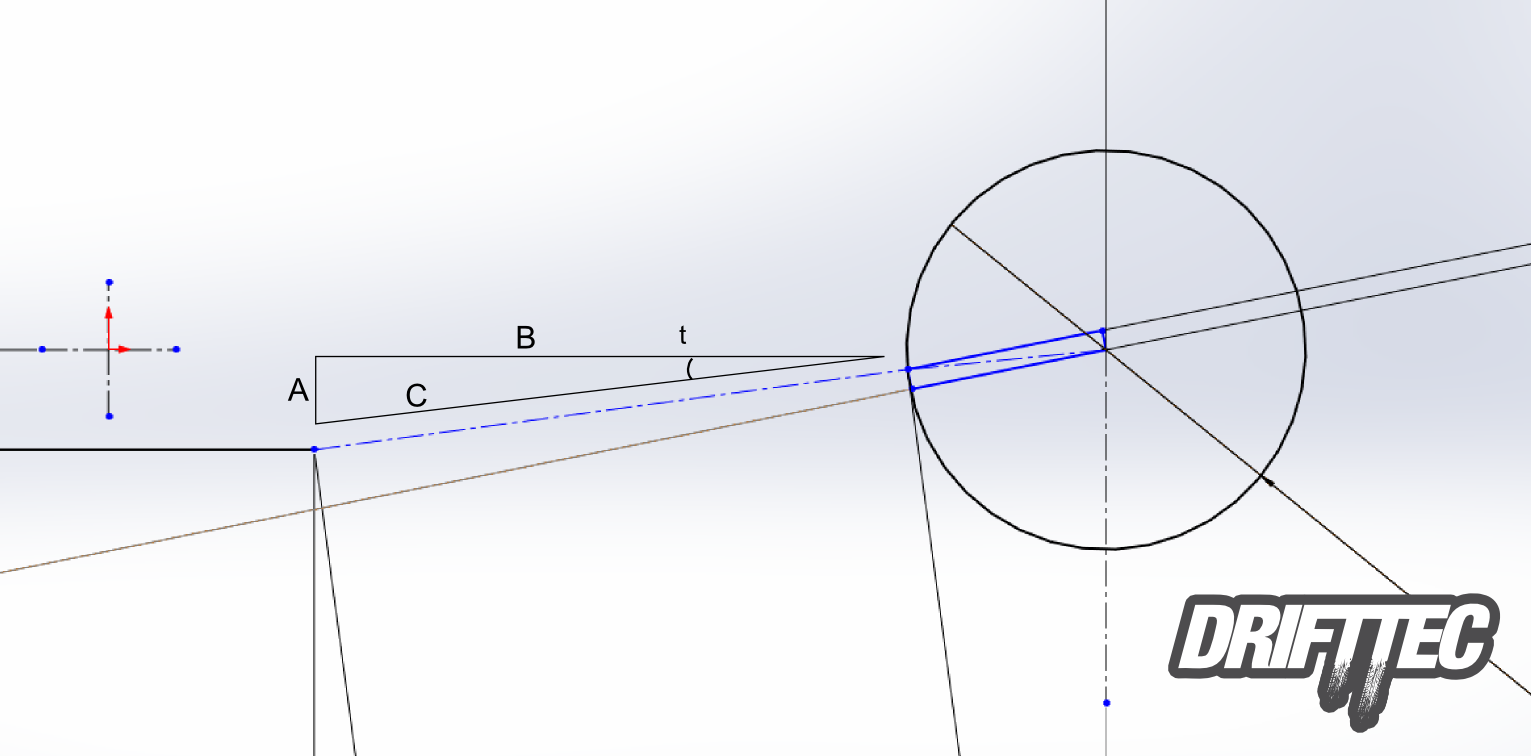
With the rack moved forward, and comparing this image to the previous image, it can be seen that the amount of lead wheel angle is increased before over-centering happens. Why? Because geometry. ‘A’ and ‘B’ are the longitudinal and lateral components of the tie rod (‘C’). ‘t’ is the angle between the longitudinal axis and the tie rod.
t = tan-1(A/B)
(When doing this calculation make sure your calculator is in degrees and not radians. Additionally you can get to degrees from radians by multiplying the radian value by 180/π)
As ‘A’ decreases (rack relocated forward) ‘t’ will also decrease. As ‘t’ decreases the amount of angle the lead wheel can achieve increases. This is because over-centering will happen when the tie-rod angle matches the angle achieved by the line drawn through the tie rod and steering axis when viewed from the top.
over-centering angle = 90° – ‘t’
That’s great, we can keep the same steering angle as before without the wheel getting as heavy or we can push the limits and set our steering stops to a more aggressive setting to achieve a higher steering angle.
Another effect of the steering rack relocation forward is the ackerman curve will shift toward toe in as seen in the following graph (down is more positive ackerman).
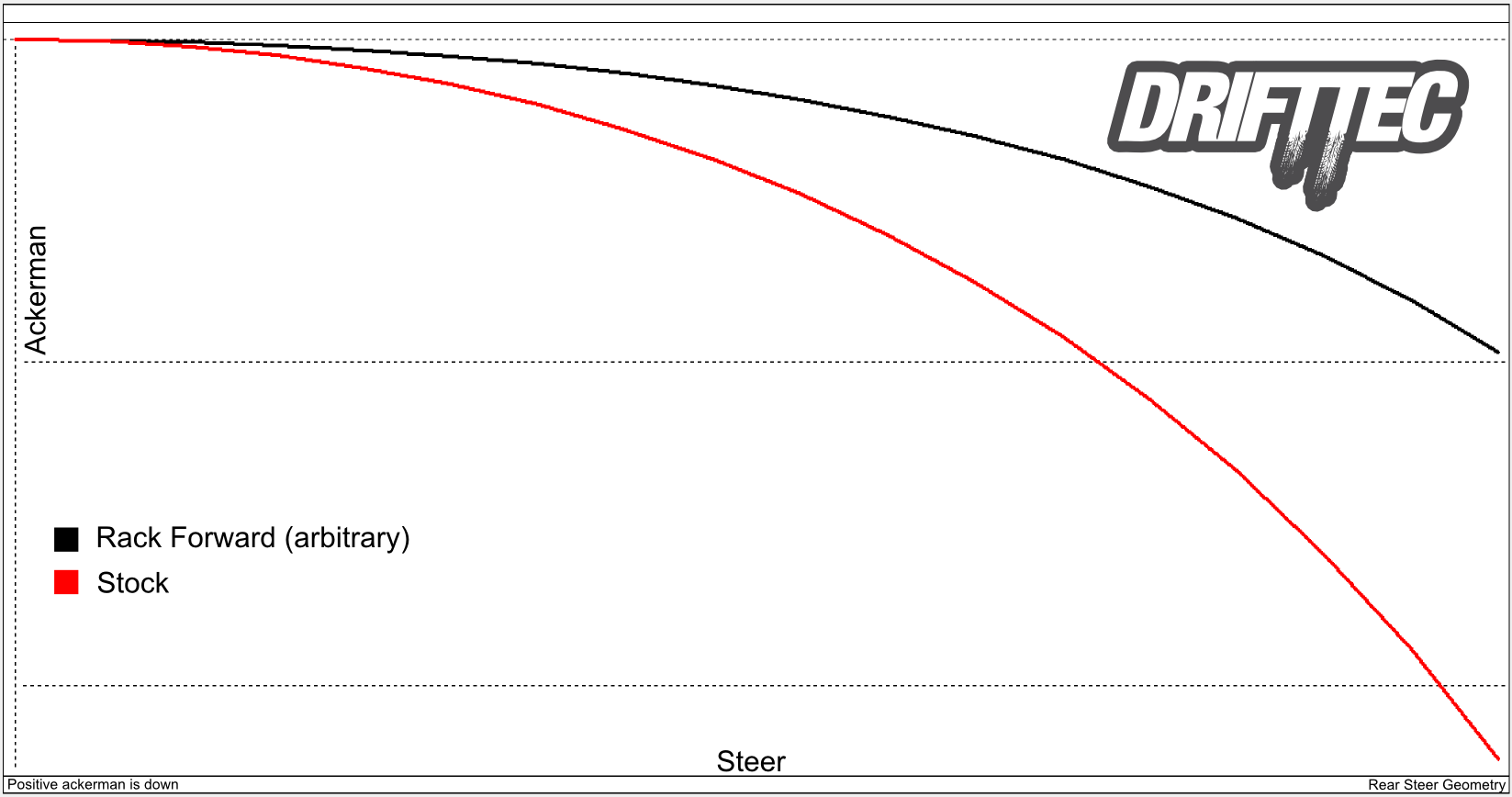
The graph shows the positive ackerman gain throughout steering travel to be less with a relocated steering rack. This is attributed to the angle of the tie rod in relation to the line drawn through the steering axis and outer tie rod pickup point when looking down on the car. When the rack is moved forward on a rear steer car, this angle is in a more neutral position allowing the rates of steering on the inner and outer wheel to be closer together resulting in less toe change throughout steering travel. There is still some debate on how much ackerman you want in a drift car so I can’t tell you what will work for your driving style, so just use this as a tool to understand the effects of moving the steering rack on ackerman.
A little bit out of scope but worth a mention, if the steering rack location were to be changed vertically it would change the bump steer characteristics of the vehicle. This would be because when looking from the front view, changing the inner tie-rod pickup point would change the relative location of the arc of travel of the tie-rod and arc of travel of the wheel in question. Generally the steering rack isn’t moved vertically in a drift car unless it’s for engine clearance.
The OEMs choose to place their steering racks in a location that compliments the tie-rod location to achieve close to conventional ackerman steering. Moving the steering rack location on a drift car can also be done to compliment the location of the tie rod end on a modified steering knuckle depending on the drivers prefrences. Also, OEMs don’t have to worry about over-centering at high wheel angles. They typically build steering stops to limit the steering travel. The design goals of someone building a daily commuter and someone building drift car differ a little bit.
Another note is the steering rack relocation trends are opposite on front steer cars (Mustang, Miata, SC300, E36, RX8, etc.). That is you would need to move the steering rack backwards on these cars to achieve the same changes as a rear steer car described in this article.
Hope this helps!
-Mark